近日,智能交通领域国际权威期刊IEEE Transactions on Intelligent Transportation Systems (IEEE T-ITS) (计算机科学一区TOP,影响因子8.4),发表了机电工程学院青年教师杨松在多模态机器人切换控制领域的最新研究成果。论文题为“A Terrain-Interactive Autonomous Switching Control Strategy for the Land-Air Bimodal Robot”。该论文以成都理工大学机电工程学院为第一单位,我院教师杨松老师为第一作者,合作团队为人工智能与数字经济广东省实验室(深圳)的刘洲研究员。
陆空多模态机器人融合了四旋翼优异的空间机动能力与轮式机器人超长的续航优势,在资源勘探、环境搜救等领域展现出巨大的应用潜力。由于飞行能耗远高于地面能耗,如何在保证三维空间可达性的前提下,最大化利用轮式地面模式以节约能耗,成了该领域亟待解决的关键难题。
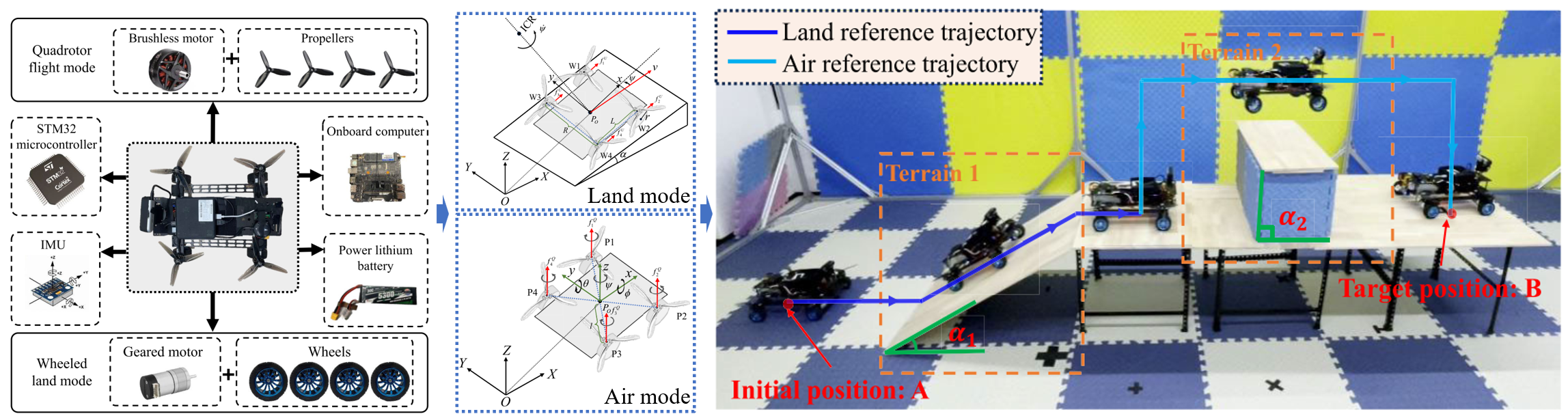
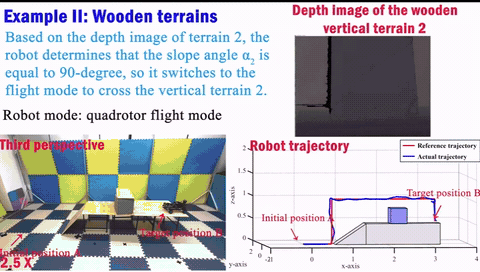
该研究将机器人的轮式地面模态与四旋翼飞行模态统一构建为一个二阶非线性状态空间模型,从而能够直接部署于低成本的微控制器中以实现近乎零延迟的模态切换控制,并提出了一种不依赖精确动力学模型的地形感知学习控制算法进行多次学习,直至跨越障碍地形,从而在确保三维空间全地形可达性的前提下,最大化利用轮式地面模式以实现显著的能耗节约。
该研究可广泛应用于环境搜救、资源勘探、特种巡检及陆空协同物流等需要高自主性与长续航的特种导航场景,为推动多模态机器人从“具备多栖运动能力”向具备“高阶环境理解与具身智能决策”的智能化自主化奠定了重要基础。
论文信息:S. Yang, W. Yu, S. Chen, F. Ma, Z. Liu and Q. Li, "A Terrain-Interactive Autonomous Switching Control Strategy for the Land-Air Bimodal Robot," in IEEE Transactions on Intelligent Transportation Systems, doi: 10.1109/TITS.2026.3692811, May 2026.
