近日,国际权威期刊Knowledge-Based Systems(中科院一区TOP,影响因子7.6)发表了机电工程学院孙玥老师团队在移动机器人路径规划领域的最新研究成果。论文题为“ACO–PAL: A Prior-Aware Learning Framework for Local Path Planning in Complex Environments”。该论文以成都理工大学为第一单位,我院硕士研究生任继全为第一作者,陈思阳、余哲林共同参与,通讯作者为我院“蓉漂计划学者”孙玥副教授,合作团队包括电子科技大学的陈意钒教授。
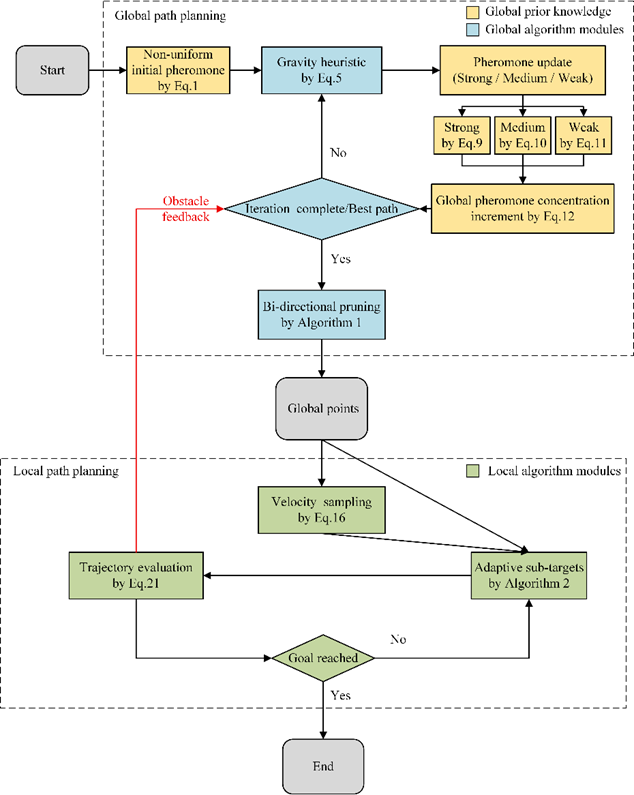
在复杂环境下实现移动机器人的高效自主导航,关键在于协调全局路径规划的最优性与局部运动控制的实时响应能力。针对现有方法中全局信息利用不充分、局部规划易陷入局部最优等问题,研究团队提出了一种新型机器人导航方法 ACO-PAL。该方法的核心创新在于构建了“先验感知学习”机制,将改进型蚁群算法提取的全局路径拓扑与方向场作为先验知识,动态注入局部规划器的决策过程中。不同于传统方法仅将全局路径作为稀疏途经点,ACO-PAL 实现了“全局意图引导局部行为”的深度协同:通过目标引力加速收敛、双向剪枝消除冗余转向,并引入全局路径吸引与角度一致性约束,使机器人在实时避障过程中始终保持对全局最优路径的趋同性。通俗地说,这项研究不仅让机器人知道“大方向往哪走”,更让其在面对突发障碍时,基于全局先验做出“更聪明、更连贯”的局部决策,从而有效抑制绕路、卡顿与反复转向等问题。实验结果表明,该方法保障避障安全的同时显著提升了复杂环境中的路径规划速度与效率,在机器人平台上得到了充分验证。
这类技术可广泛应用于仓储物流、园区配送、巡检机器人及无人机等需要高自主性的导航场景。从更高层次看,ACO-PAL 的核心价值在于为先验知识如何在局部规划中实现结构化表达与自适应融合提供了系统性解决方案,探索了“全局先验引导局部学习”的技术范式。该研究突破了传统分层导航中全局与局部割裂的局限,使机器人能够在未知与动态环境中兼具全局方向感与局部应变力,为推动机器人从“能移动”向“会思考、会规划”的智能化发展奠定了重要基础。该研究得到了国家自然科学基金的支持。
论文信息: Ren, J., Chen, S., Yu, Z., Chen, Y., Sun, Y. 2026. ACO–PAL: A Prior-Aware Learning Framework for Local Path Planning in Complex Environments. Knowledge-Based Systems.
论文链接:https://www.sciencedirect.com/science/article/pii/S0950705126004156
